Animals make light work of walking
The range of footfall patterns seen in walking amphibians, reptiles and mammals - including hippopotamus, horse and (inverted) sloth - are consistent with simple principles of mechanical work minimisation.
One of the fundamental objectives of studying animal locomotion is to understand how and why animals move the way that they do.
In a new paper out last week, the Structure and Motion Lab’s Dr Jim Usherwood and Dr Zoe Davies show that the walking gaits of quadrupeds fit closely with a model of work minimisation. Until now, the way animals move their limbs during walking has been considered to be determined by stability, while this new work suggests that actually animals may be minimising the mechanical work they have to use to get from A to B. When it came to data collection for the study, no fancy equipment was needed: the data was collected from freely available YouTube videos! While it took a little effort to persuade the editors (you can find this discussion published), it allowed the researchers to survey a wide range of species and provide the links so that anyone could check the primary data sources.
Walking gaits can be easily described using 2 numbers: duty factor and phase. Duty factor is the proportion of the stride that each foot is in contact with the ground. Phase describes the timing of the forefoot footfall following the hindfoot footfall on the same side. Despite a huge number of possible duty factor-phase combinations, animals use very few. The researchers studied a wide range of quadrupedal animals and discovered that animals fall into 3 very distinct groups when it comes to the walking gait they use.
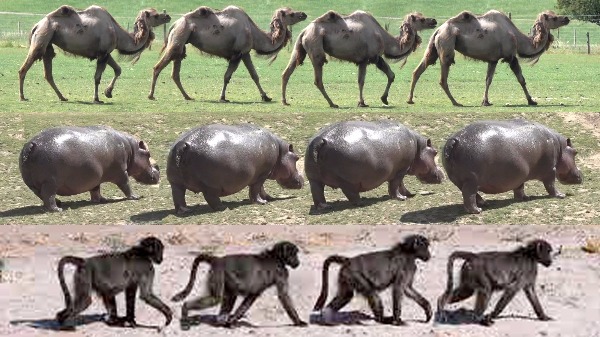
Group 1 consisted of slow, cold-blooded and small animals (Hippos, crocodiles, mice…). These animals had high duty factors and a phase of around 40% - the limbs move in almost diagonal pairs with the forefoot of the diagonal pair hitting just before the hindfoot. Group 2 included all medium to large mammals (horses, big cats, bears, rhinos, giraffes…).
Group 2 animals had lower duty factors with a phase of around 25% - their footfalls are evenly spaced in time following a lateral sequence of back left – front left – back right – front right.
The third group were the primates. Primates had a similar duty factor to the Group 2 animals but used a diagonal sequence, 75% phase (back left – front right – back right – front left). When the researchers calculated mechanical work for all duty factor-phase combinations, they discovered that these distinct groups fell exactly where work was minimised.
This study adds to our understanding of what ‘matters’ to animals when they locomote, and it appears work matters a great deal.
The study was published on 14th of September 2017. To learn more, please read: Work minimization accounts for footfall phasing in slow quadrupedal gaits