From the geometry of a toppling table to a new ‘grazing’ gait? And perhaps why monkeys walk weirdly
In a new paper published in the Royal Society journal Biology Letters, two Royal Veterinary College (RVC) experts exploited the geometry of a wobbly table to explain the ‘grazing’ gait in quadrupeds as well as walking in primates.
Professor Jim Usherwood and Dr Ben Smith, the authors of the paper, are both based at the RVC’s Structure and Motion Laboratory. Professor Usherwood is a Wellcome Trust Senior Research Fellow and Reader while Dr Smith is a postdoctoral researcher.
The article, ‘The grazing gait, and implications of toppling table geometry for primate footfall sequences’ was published today and can be found here.
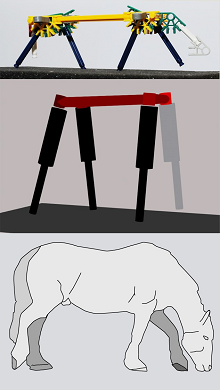
When grazing, animals use a footfall timing that is quite different from walking: they hold themselves steady for long periods, but once they take a step forward with a front foot, they immediately follow this with a step forward with the diagonal hindfoot (as shown in video below).
This can be considered a newly recognised ‘gait’, and is explained with the toppling motion of a wobbly table. When the wobbly table model is applied to the weird footfall order used by monkeys, the instant of toppling switches, potentially allowing the placement of the hand to be made with more control – important when walking along branches.
Explaining the relevance of the research, Professor Usherwood said: “This study is pleasing: sorting out a simple bit of geometry – that of a wobbly four-legged table – got us looking really closely grazing animals. Remarkably, the local cows, sheep and horses all matched the model predictions brilliantly. After that we started thinking of further implications, and spotted the issue with primates.
“The unusual footfall patterns of monkeys, lemurs etc. have been puzzling scientists for decades. Our model suggests that their walking style might help when walking along branches, and it is nice that some other branch-walkers (including possums!) also match this pattern.”
Alluding to further research possibilities, he added: “The next stage will be developing robots to demonstrate the principles of economical and mostly stable (but at least predictable) quadrupedal gaits. These won’t be fast or technologically advanced, but they should be simple to control and robust to random breaks in communication.”
The study was supported by the Wellcome Trust.
You may also be interested in:
-
New study from the RVC reveals that dinosaurs may have used their tails to power jumps

New research from the Royal Veterinary College (RVC) has revealed that when dinosaurs leapt into …